

★售價不含Micro:bit開發板、悟空擴展板
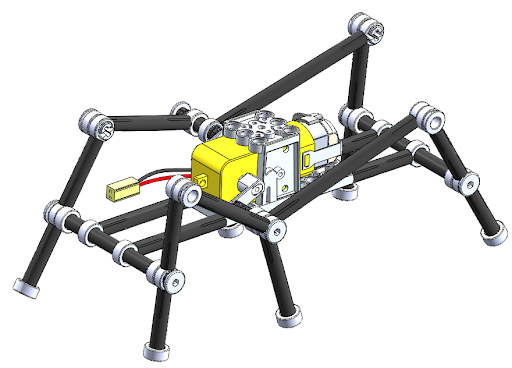
六足行走機器人,跨步時至少有3足抓住地面,和其他機器人相比之下是相對穩定的行走模式
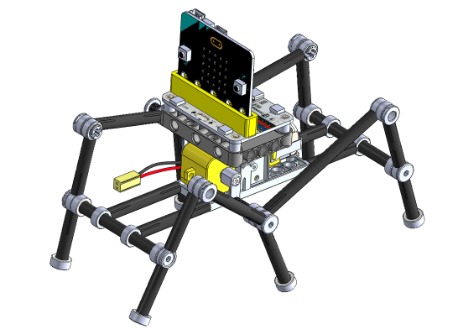
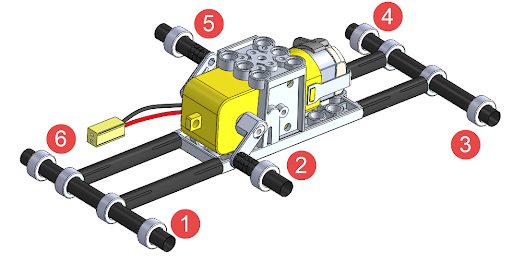
成品展示
#電池版本

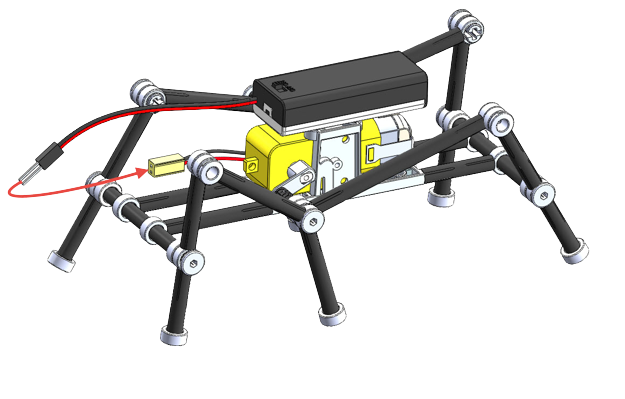
#結合Micro:bit、悟空擴展板版本
出貨明細

組裝參考步驟
Step1. 材料準備
裁剪吸管:7.5公分x4、4.5公分x6、4公分x4、3公分x6、2.5公分x2
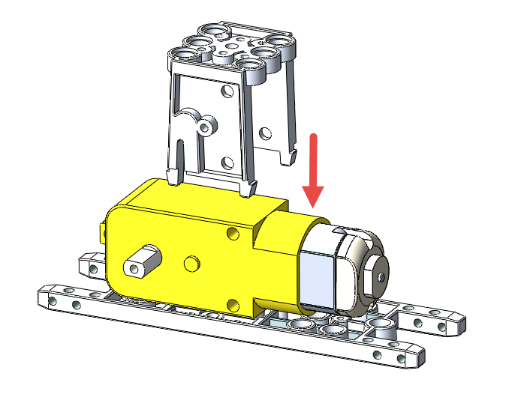
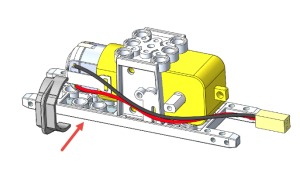
Step2. 組裝馬達盒
A.馬達置於馬達盒底板上,注意方向。
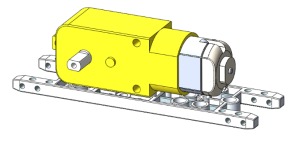
B.從上方將馬達盒上蓋輕輕壓入,卡榫具有防呆設計,正確方向位置可以輕鬆組合。
C.將導線端,從上穿入馬達電源銅片小孔。
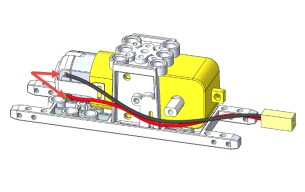
D.將免焊扣環確實卡入卡溝,固定導線。
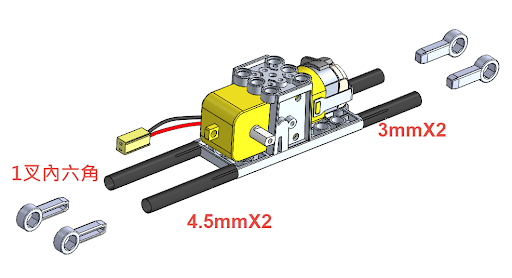
Step3.用3mm與5mm組裝前後足支架,注意要選用1叉內六角接頭
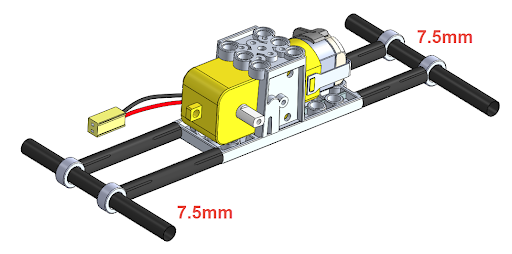
Step4.用7.5cm的吸管,穿過前後支架
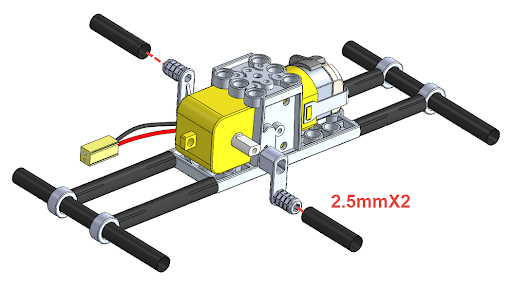
Step5.組裝驅動臂與延伸桿
Step6.如圖套上O環定位,一共6個O環
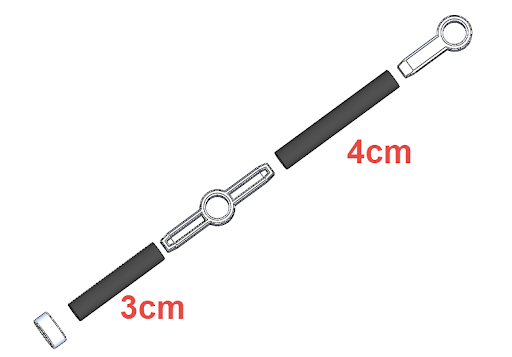
Step7.前足後足,取出3cm及4cm吸管,各組裝4組
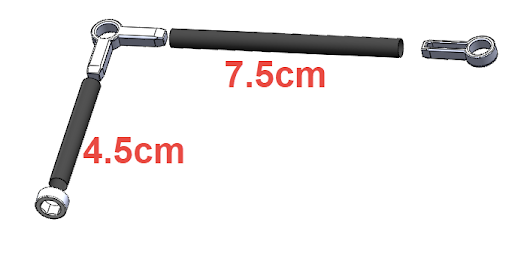
Step8.中足,取出7.5cm及4.5cm吸管,各組裝2組
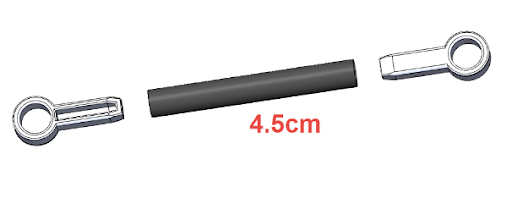
Step9.拉桿,組裝2組
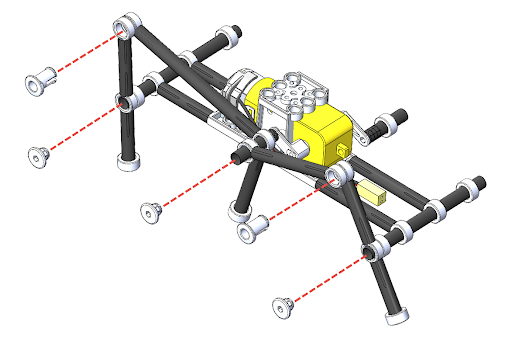
Step10.使用端面扣釘固定橫桿支點,使用關節扣釘連接連桿做關節
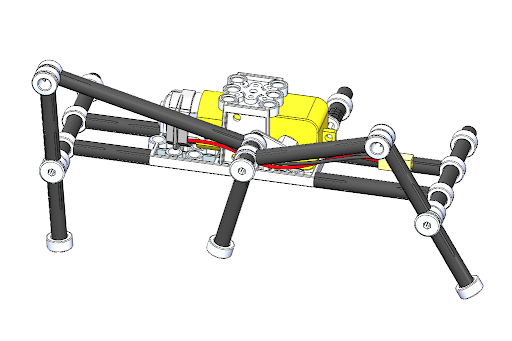
Step11.相對側以鏡射方式,依序組裝足部與定位-主體完成
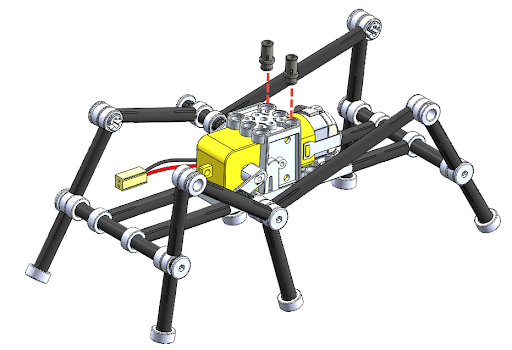
Step12.電池版本完成品
Step13.組裝插銷
Step14.成品
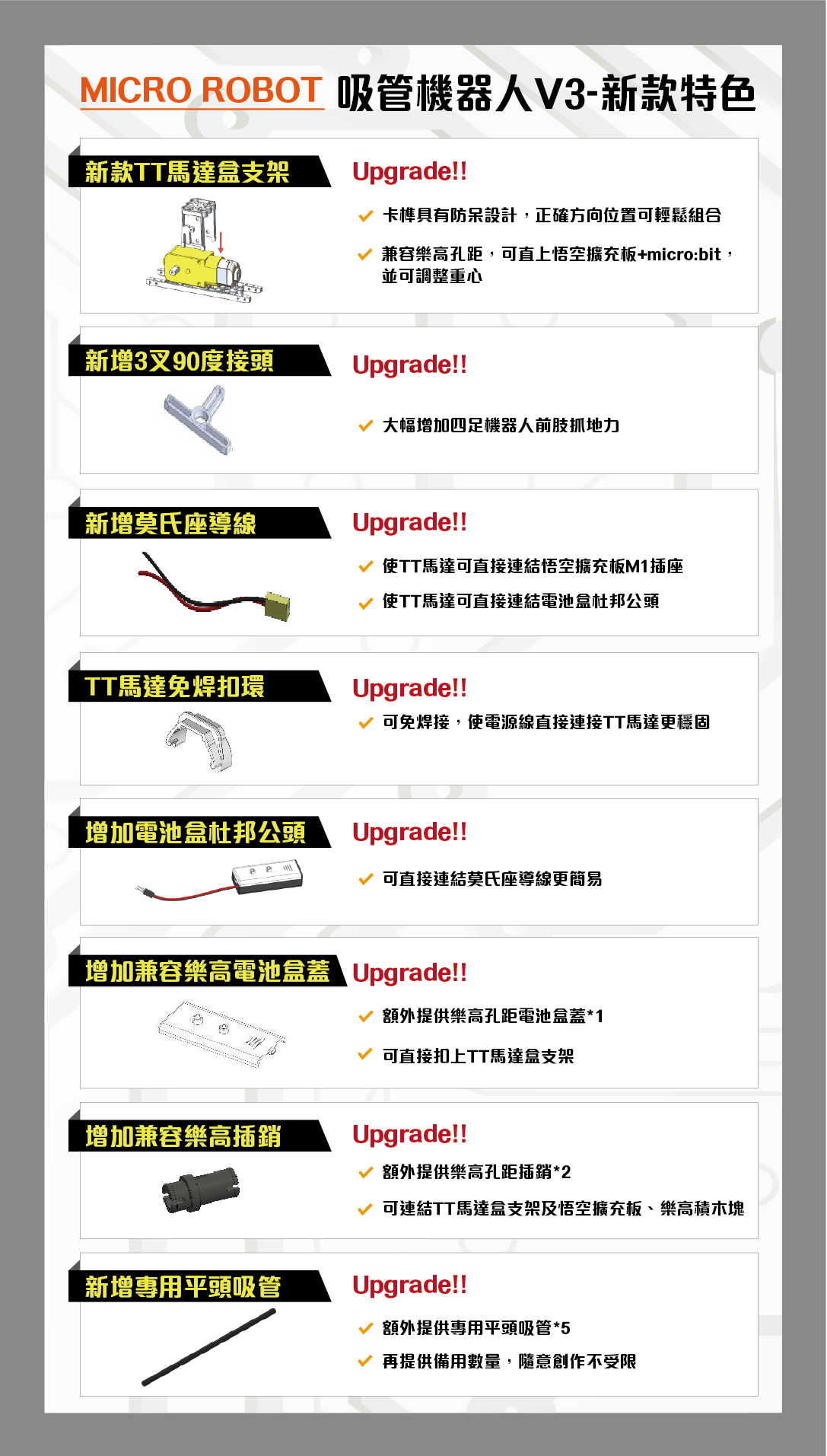
新款吸管機器人特色

相關商品


")



標籤: 吸管機器人